

") English
English
Displaying items by tag: rex assist
Riceventi REX Assist: Aggiornamento 1.20
Il firmware si installa direttamente tramite JETIStudio utilizzando l'interfaccia USBa.
Modifiche
- Migliorata la stabilità del sistema ad alte temperature
Per i dettagli su come aggiornare le riceventi con JETIstudio seguire il seguente tutorial
Riceventi REX Assist: aggiornamento 1.19
Il firmware si installa direttamente tramite JETIStudio utilizzando l'interfaccia USBa. In questa versione viene corretto il comportamento del beccheggio in modalità Horizon
Modifiche
- Il beccheggio non è più influenzato dall'accelerazione in modalità Horizon
Per i dettagli su come aggiornare le riceventi con JETIstudio seguire il seguente tutorial
Dopo aver attivato l'ASSIST compaiono errori costanti a schermo. Cosa fare.
Se all'accensione di una ricevente REX ASSIST compaiono errori costanti sullo schermo anche dopo avere eseguito la calibrazione può essere necessario formattare la memoria per ripristinare il corretto funzionamento. Vediamo come fare.
Come attivare il vario integrato nelle riceventi REX Assist
All'interno delle riceventi REX Assist è presente un sensore vario con funzionalità simili al sensore MVario2, tuttavia per attivarlo è necessario acquistare il codice di sblocco dal Jeti swshop. Vediamo come attivare questa funzione in pochi semplici passi.
Come collegare una ricevente di Backup ad una ricevente REX in EXBus
Come collegare riceventi di backup in 2,4GHz o 900 a riceventi REX e REX Assist. Collegare entrambe le riceventi alla trasmittente DC/DS in modalità DoppioHF o impostare la ricevente di backup in modalità CLONE. Tutte le riceventi REX sono dotate di porte multifunzione E1 e E2 con possibilità di ingresso backup. Una di queste porte deve essere impostata in "EXBus Input/backup" (richiesto firmware 1.13 per REX e 1.12 per REX Assist). Nella ricevente principale impostare il Fail-Safe desiderato per i servi. Nella ricevente di backup invece disattivare il FailSafe e impostare un uscita come EXBus.
Nel caso di satellite RSat2 l'uscita EXBus viene gestita esclusivamente dalla porta Ext. mentre nel RSAt900 o nella REX3 si hanno a disposizione le porte E1 ed E2 liberamente configurabili.
Nuovo firmware per REX Assist e REX

Il firmware delle riceventi REX e REX Assist subisce un nuovo aggiornamento che prevede l'introduzione di nuove interessanti funzioni soprattutto per il sistema Assist. La versione 1.12 delle REX Assist prevede infatti l'introduzione della possibiltà di gestire i Trim quando la stabilizzazione è attiva e la possibilità di collegare una ricevente di backup in EXBus così da non dovere passare tramite il PPM permettendo di lavorare con 24 canali pieni con satelliti in 2,4Ghz o 900MHz. Il firmware 1.13 delle riceventi REX invece introduce la possibilità di avere un uscita compatibile con il protocollo SBUS.
Riceventi REX Assist: aggiornamento 1.12
L'aggiornamento 1.12 del sistema Assist prevede l'introduzione di funzioni importanti come l'ingresso ricevente backup in EXBus, l'introduzione di una funzione per migliorare le rotazioni del modello e la possibilità di gestire i TRIM o miscelazioni per situazioni come Butterfly negli alianti o fase di atterraggio per le turbine. Aggiornamento valido per tutte le riceventi REX Assist.
Aggiornamento per REX e REX Assist

Nuovo aggiornamento per le riceventi REX e REX Assist con nuove e importanti aggiunte!
Le REX con la realease 1.12 aggiungono infatti il supporto per i satelliti esterni in modalità EXBus migliorando notevolmente l'integrazione dei satelliti esterni aumentando velocità di trasmissione e sicurezza. Le REX Assist invece introducono profondi aggiornamenti sul comportamento della stabilizzazione e nuove funzioni per aereo e multirotore.
Vediamo i dettagli:
Riceventi REX Assist: aggiornamento 1.10
L'aggiornamento si esegue utilizzando JETI Studio! E' necessario aggiornare anche le radio per scaricare i nuovi Device aggiornati!
Attenzione! Prima di eseguire l'aggiornamento SCOLLEGARE tutti i servocomandi, centraline o dispositivi collegati alla ricevente! Dopo aver eseguito l’aggiornamento alla versione 1.10 è necessario verificare tutte le corse ed I guadagni precedentemente impostati. L’algoritmo di stabilizzazione è stato modificato rispetto la versione precedente. Verificare a terra il comportamento dell’assist per evitare sorprese.
Nuove funzioni:
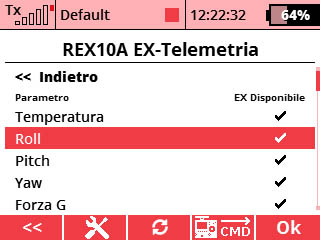
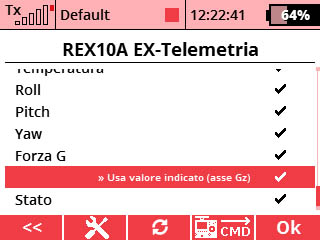
- L’utente può decidere quali parametri della telemetria verranno trasmessi dalla ricevente alla trasmittente. Aggiunto anche parametro “Stato” che trasmette il modo di volo selezionato in forma numerica. (0= Assist disattivato, 1-3= il corrispondente modo di volo, 4= FailSafe). Per la voce Forza-G è possibile scegliere tra assoluta (solamente positiva e calcolata da tutti e tre gli assi) e Forza-G solo per l’asse Z (per calcolare correttamente il valore per manovre positive e negative).
- Aereo: la modalità Training è stata rivista. La stabilizzazione standard (damping) è attiva anche nella modalità Training, ma non permette al modello di superare i valori impostati di rollio e beccheggio. Viene applicato un ritorno lento all’assetto orizzontale.
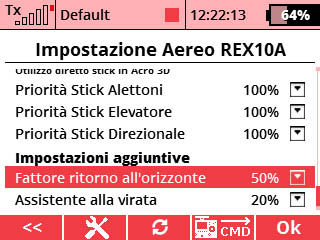
- Aereo: modalità Horizon rivista. Il funzionamento è stato reso simile alla modalità classica di stabilizzazione con mantenimento dell’orizzonte. La velocità ed intensità del ritorno al volo orizzontale può essere impostato nel menu Configurazione – Impostazioni Aereo
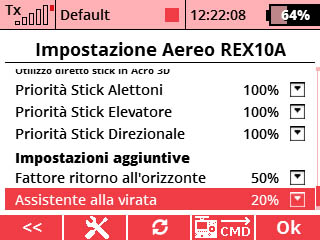
- Introdotta funzione di Assistente alla virata. Questa funzione permette ai principianti di virare utilizzando esclusivamente gli alettoni. Nel menu Configurazione – Impostazioni Aereo impostare la percentuale di guadagno dell’assistenza alla virata (20% per esempio), dopo di che nel menu Stabilizzazione/Modi Volo abilitare l’assistenza nei modi desiderati cliccando su Util. Assistente Virata. La reattività di questa funzione dipende dalla velocità del modello (il coefficiente deve essere inferiore a velocità maggiori). Normalmente è meglio cominciare con valori inferiori per poi aumentare.
- Aereo: aggiunta modalità stabilizzazione 2D Mode. In questa modalità l’assetto del modello è limitato da un angolo di rollio e beccheggio reimpostati. La posizione degli stick corrisponde all’angolo di rollio e beccheggio permettendo al modello di volare dritto senza perdita di quota. Consigliamo di attivare l’assistente alla virata per virare più dolcemente in questa modalità
- Aggiunto logging per gli eventi interni.
- Nel DeviceExplorer è possibile vedere le percentuali in tempo reale delle uscite della ricevente nel menu Configurazione– Uscite Ricevente
- Multirotore: aggiunta la possibilità di avviare la calibrazione automatica dei regolatori dopo lo startup (consigliato firmware BLHeli). Procedura:
- ATTENZIONE: Rimuovere SEMPRE le eliche!!
- Entrare nel menu Configurazione - Impostazioni Multirotore. Scorrere il menu fino alla voce Calibrare i regolatori dopo il riavvio…
- Confermare premendo F5(Si). Ora la ricevente attende il riavvio e non considererà alcun comando.
- Dopo il riavvio e l’inizializzazione, la ricevente imposta tutti i motori al massimo (default 1.9ms). Dopo 5 secondi le uscite vengono riportate a Gas spento (default 1.0ms). In questo modo è possibile impostare valori di avvio e minimo per ogni motore contemporaneamente.
- Opzionale: modificare il valore del gas al mimino visto la modifica di calibrazione
- Multirotore: Aggiunto supporto per frame X8.
- Possibilità di montaggio a 270° sull’asse dell’imbardata.








Modifiche:
- Risolto messaggio “Calibrazione Accelerometri” che compare più volte in alcuni dispositivi dopo avere eseguito la calibrazione.
- Il processo di inizializzazione è ora più immune a vibrazioni durante l’avvio..
- Se la trasmittente utilizza tutti e 24 i canali la Stabilizzazione EXBus lavora su 16 canali e clona i rimanenti 8 per poter utilizzare il sistema assist anche su maxi modelli con programmi da 24 canali.
- Quando si utilizza la REX Assist con centralbox l’uscita dell’EXbus dell’Assist si comporta secondo l’impostazione del fail safe della ricevente Assist impostata nel menu Configurazione – Stabilizzazione/Modi Volo menu:
- Se viene attivato il Fail Safe stabilizzato l’uscita EXBus rimane sempre stabilizzata anche se la ricevente perde il segnale (considereranno entrambi i link ed il segnale PPM).
- Se il FailSafe prevede la disattivazione dell’Assist, l’uscita EXBus viene disattivata dopo la perdita di segnale da entrambi i link e il segnale PPM esterno. Questo permette alla CentralBox di passare sulla porta RX2.
- L’importazione di file da JETIstudio funziona correttamente.
- Aerobatics factor (see REX Assist Configuration – Airplane settings) is set to 100% by default.
- Aggiunta la possibilità di formattare la memoria Flash interna tramite JETIBox. Nella JETIBOX trovate il menu Settings – PresetToSetup (Factory default) – PresetToSetup (Format). Formattando vengono cancellati tutti i dati così come il binding.
- Aereo: La stabilizzazione degli alettoni può essere disattivata correttamente per ciascuna fase di volo.
- Multirotore: attivate uscite Servo Standard.
- Se viene impostato un ingresso PPM ma non è presente viene generato un allarme di segnale debole indicato con “S”.
- Aereo: l’armamento del sistema non è possibile con una combinazione di posizionamento degli stick come per i multi rotori..
- I dispositivi EXBus collegati alla ricevente non vengono indicate come scollegati come in casi sporadici utilizzando la versione precedente.
- Multirotore: La direzione dei motori viene ora mostrata correttamente per I frame Esacottero (Y).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}